

Il software di pianificazione e controllo Pix4Dcapture offre la possibilità di pilotare quattro diversi tipi di missioni con autopilota ed una missione manuale ma semiautomatica.
Per ottenere i migliori risultati dal piano di acquisizione delle immagini, è necessario scegliere il tipo di missione ed il drone in base al terreno ed agli oggetti che devono essere rilevati.
A seconda del drone utilizzato, alcuni tipi di missioni non sono disponibili. In questo caso, il tipo di missione non verrà visualizzato nella schermata principale dell’applicazione.
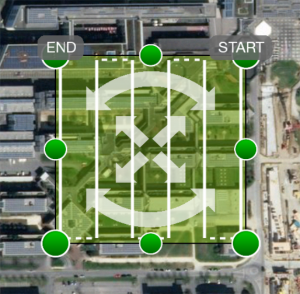
Griglia
Pianifica e vola una missione rettangolare con ripresa nadirale.
Adatto alla maggior parte degli ambienti. Assicura che le immagini vengano scattate con la sovrapposizione richiesta per un’elaborazione ottimale.
Consigliato nei seguenti casi:
-
Interesse principale per output di mappe 2D (DSM, ortomosaico, ecc.).
-
Superficie relativamente piatta (es. Campi, lavori in terra).
-
Vasta area
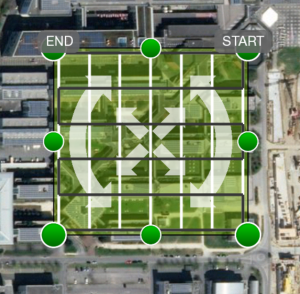
Doppia griglia
Pianifica e vola due missioni consecutive rettangolari con ripresa nadirale.
Le immagini sono prese da più lati, con la sovrapposizione richiesta, per un’elaborazione ottimale. Rispetto alla semplice griglia, questa missione è consigliata per volare più vicino agli oggetti al fine di catturare più dettagli verticali.
Consigliato nei seguenti casi:
-
Interesse principale per gli output del modello 3D (nuvola di punti, mesh, ecc.).
-
Superficie con fluttuazioni di altezza o oggetti (ad es. Edifici, foreste).
-
Area piccola e media poiché il tempo di volo è raddoppiato

Poligono
Pianifica e vola una missione poligonale con ripresa nadirale.
Adatto per la maggior parte degli ambienti che richiedono mappatura dalla forma più complessa. Assicura che le immagini vengano scattate con la sovrapposizione richiesta per un’elaborazione ottimale.
Consigliato nei seguenti casi:
-
Interesse principale per output di mappe 2D (DSM, ortomosaico, ecc.).
-
Superficie relativamente piatta (ad es. Campi, lavori in terra).
-
Vasta area
-
Forma complessa e vincoli nei confini del volo.
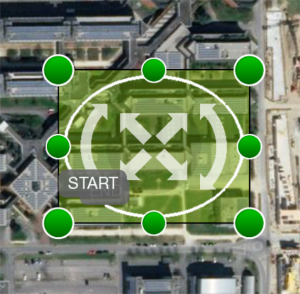
Circolare
Pianifica e vola una missione ellissoide attorno agli oggetti.
Assicura che le immagini vengano prese da tutti gli angoli attorno a un punto target, con la sovrapposizione richiesta per un’elaborazione ottimale. Per oggetti alti, si consiglia di effettuare diverse missioni circolari a diverse altitudini.
Consigliato nei seguenti casi:
-
Interesse principale per gli output del modello 3D (nuvola di punti, mesh, ecc.).
-
Oggetto isolato (es. Torre, pilone, edificio).
-
Piccola area

Volo libero
Pianifica e vola una missione di volo libero (utenti avanzati).
Adatto per mappare oggetti più difficili che richiedono maggiore flessibilità. L’otturatore della fotocamera viene attivato automaticamente in base a un intervallo di distanza orizzontale e verticale. È necessario pilotare manualmente il drone.
Consigliato nei seguenti casi:
-
Interesse principale per gli output del modello 3D (nuvola di punti, mesh, ecc.).
-
Piccola area
-
Strutture complesse o verticali (ad es. Facciata di edificio, scogliera, ponte, ecc.)
Multi-batteria
Pianifica e vola una missione particolarmente lunga senza la preoccupazione della durata della batteria.
Durante la missione – qualunque essa sia – il drone quando arriva alla percentuale di batteria residua minima, torna indietro, l’operatore può sostituire la batteria e far quindi ripartire il drone che grazie al software di pianificazione Pix4Dcapture riprenderà a mappare esattamente da dove aveva interrotto prima di tornare indietro per il cambio.