
Sistema LiDAR aereo ad alta precisione
ZENMUSE L2
Portata Potente, Precisione Elevata
IN PRONTA CONSEGNA

Caratterizzata da un design integrato, DJI Zenmuse L2 incorpora un modulo LiDAR, una fotocamera per mappature RGB con CMOS da 4/3, un sistema IMU ad alta precisione ed uno stabilizzatore a 3 assi e consente, alle piattaforme di volo DJI, di acquisire dati geo spaziali affidabili e precisi. Utilizzata in abbinamento con il software DJI Terra, offre una soluzione ottimale per la raccolta di dati 3D e una post-elaborazione ad alta precisione.
Soluzione LiDAR integrata
DJI Zenmuse L2, grazie alla potenza del suo hardware, assicura risultati di scansioni molto accurate di oggetti, anche complessi, nell’ambito un ampio raggio operativo, oltre che un’acquisizione molto rapida delle nuvole di punti. Direttamente sul campo, in fase operativa è possibile, sfruttando i report sulla qualità delle attività generati da DJI Terra, visualizzare, riprodurre ed elaborare modelli di nuvole di punti in tempo reale. Gli utilizzatori possono così ottenere risultati precisi con una sola operazione di post-elaborazione.
Precisione
La combinazione di un GNSS e di un modulo IMU ad alta precisione garantisce una precisione verticale di 4 cm e una precisione orizzontale di 5 cm. [1]
Efficienza
Operativa immediatamente subito dopo l’accensione, può raccogliere dati geo spaziali e RGB da un’area di 2,5 kmq in un singolo volo. [2]
Intuito
L’ utilizzo di DJI Zenmuse L2 unitamente a Matrice 350 RTK e DJI Terra, offre una soluzione completa, semplificando il flusso di lavoro.

LiDAR basato sull’inquadratura

Distanza di rilevamento aumentata del 30%[5]
DJI Zenmuse L2 esegue rilievi da una distanza massima di 250 m con una riflettività del 10% e 100 klx,[3] o di 450 m con una riflettività del 50% e 0 klx. [3] Può operare fino ad una altitudine di 120m, garantendo sicurezza ed efficienza operative.
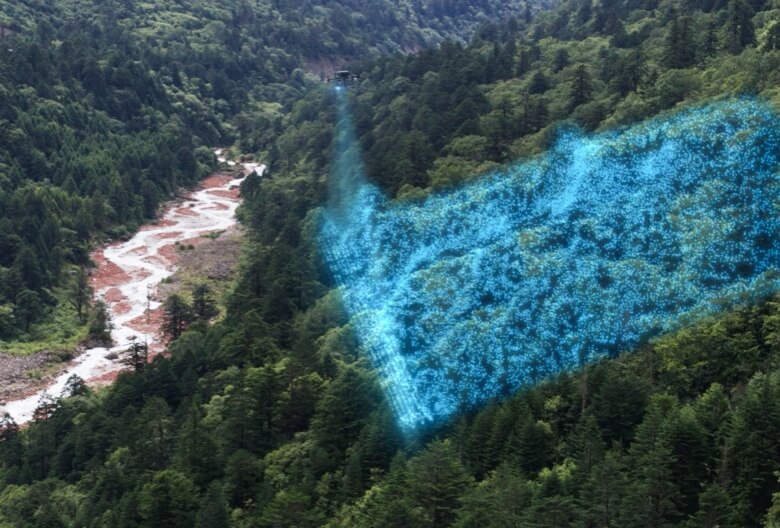
Punti laser più piccoli, nuvole di punti più dense
DJI Zenmuse L2 è in grado di penetrare una vegetazione densa, generando modelli di elevazione digitale (DEM) molto più precisi rispetto alla versione L1. Questo grazie alla dimensione di un singolo punto di soli 4×12 cm a 100 m, (pari ad un quinto di quella delle versione L1), e alla capacità di rilevare maggiori dettagli in oggetti molto più piccoli.
Supporto per 5 ritorni
In fase di rilievo di aree con vegetazione molto fitta DJI Zenmuse L2 riesce a catturare più punti a terra anche se posti sotto al fogliame.
Acquisizione delle nuvole di punti: 240.000 pt/s
DJI Zenmuse L2 può arrivare a una velocità di generazione massima di 240.000 punti al secondo in qualsiasi modalità di ritorno (sia singola che multipla), potendo così acquisire una quantità di dati superiore, all’interno delle nuvole di punti, in un determinato arco di tempo.
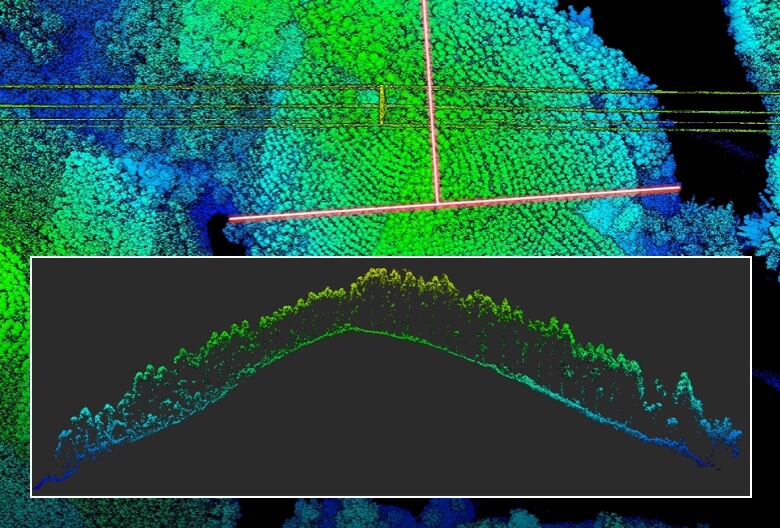
Doppia modalità di scansione
Per adattarsi al meglio alle esigenze dell’operatore DJI Zenmuse L2 supporta due diverse modalità di scansione: scansione ripetitiva e scansione non ripetitiva. Con la prima modalità si ottengono nuvole di punti più accurate ed uniformi con risultati di alta precisione, con la seconda modalità viene garantito un livello superiore di penetrazione con l’ottenimento di informazioni più strutturali ed è per questo particolarmente adatta alle ispezioni di foreste, linee elettriche ed altri scenari analoghi.
Design basato sul frame
La progettazione basata sul frame garantisce un tasso di dati effettivi della nuvola di punti fino al 100%. Utilizzando DJI Zenmuse L2 insieme ad uno stabilizzatore a tre assi, si ottengono migliori possibilità di rilevamento degli scenari.
Sistema IMU ad alta precisione
Alta precisione
DJI Zenmuse L2 accede alle informazioni relative a posizione, velocità e altitudine in modo estremamente preciso grazie all’utilizzo combinato del sistema IMU ad altra precisione con il sistema RTK del drone per la fusione dei dati in fase di post-elaborazione. L’affidabilità operativa e la precisione sono inoltre aumentate grazie alla maggiore adattabilità ambientale del sistema IMU.
Precisione di imbardata [6] 0,2° in tempo reale, 0,05° dopo l’elaborazione
Precisione beccheggio/rollio [6] 0,05° in tempo reale, 0,025° dopo l’elaborazione
Modulo IMU operativo senza riscaldamento
Per offrire un’esperienza ottimale sul campo, le prestazioni del sistema IMU sono state notevolmente migliorate rispetto alla versione precedente. Il sistema risulta essere pronto all’uso subito dopo l’accensione ed il drone associato può iniziare ad operare immediatamente quando l’RTK è in stato FIX.
Fotocamera RGB per la mappatura

CMOS da 4/3 e otturatore meccanico
Per garantire un miglioramento delle immagini complessive ed aumentare il livello di dettaglio nelle nuvole di punti con colori reali, le dimensioni dei pixel sono state aumentate a 3,3 μm, rispetto alla precedente versione L1, per arrivare ora a 20 MP. Inoltre, per ridurre ulteriormente i costi di esercizio, l’intervallo minimo per le foto è stato ridotto a 0,7s mentre il numero massimo di cicli dell’otturatore della fotocamera per la mappatura è stato aumentato a 200.000. La fotocamera RGB può comunque scattare foto e registrare video, o raccogliere immagini per la mappatura della luce visibile, anche quando non si stanno raccogliendo nuvole di punti.
Esperienza operativa ottimizzata
DJI Zenmuse L2 supporta rotte di tipo intermedio, ad area e lineari per la gestione di tutte le attività di ispezione da svolgere in differenti scenari.
DJI Pilot 2 supporta tre differenti modalità di visualizzazione: RGB, nuvola di punti e visualizzazione affiancata RGB/nuvola di punti.
Per migliorare la sicurezza del volo, attivando il telemetro (RNG, Rangefinder) laser, è possibile accedere alle informazioni sulla distanza tra il modulo LiDAR e l’oggetto al centro del FOV. Sono inoltre supportati quattro modelli di colore per le nuvole di punti in tempo reale e precisamente riflettività, altezza, distanza ed RGB..
Il modello 3D della nuvola di punti [7] può essere visualizzato direttamente nell’album al termine dell’operazione, possono inoltre essere uniti più modelli 3D delle nuvole di punti, generati da più voli, per poter verificare in tempo reale la qualità operative e prendere eventuali decisioni in merito.
L’app DJI Pilot 2 genera automaticamente un report sulla qualità delle attività, al termine della raccolta dei dati relativi alle nuvole di punti, in modo da consentire la verifica dei dati direttamente in loco ed in tempo reale, aumentando la possibilità di reazione e semplificando il lavoro da svolgere sul campo.
Le stazioni base RTK possono essere configurate dagli operatori prima dell’inizio delle operazioni, soprattuto negli ambiti operativi più complessi, di modo da evitare l’eventuale perdita dei dati a causa delle interferenze, interruzione della trasmissione video o altre problematiche. Al termine delle operazioni poi, è sufficiente importare i file originali sul software DJI Terra e utilizzare il processo PPK (Post-Processing Kinematic) per la ricostruzione dei modelli ad alta precisione.
Il software DJI Terra garantisce un post-elaborazione affidabile ed efficiente, con una sola singola operazione, durante l’importazione dei dati delle nuvole di punti. E’ possibile generare un modello 3D della nuvola di punti in formato standard con un semplice clic, dopo il calcolo della traiettoria della nuvola di punti e l’ottimizzazione della precisione. E’ possibile sfruttare il tipo punto di terreno (Ground Point Type) per generare un modello di elevazione digitale (DEM) durante la classificazione del punto a terra. La funzione di controllo e verifica della precisione può essere utilizzata per analizzare la qualità delle nuvole di punti.
Scenari di utilizzo
DJI Zenmuse L2, se utilizzata insieme alle piattaforme di volo DJI Enterprise e all’app DJI Terra, può eseguire ispezioni e mappature del territorio, oltre che ispezioni per la gestione di linee elettriche, foreste e infrastrutture, e molti altri scenari.
Ispezione e mappatura terreno

Linee elettriche

Boschi e foreste

Infrastrutture

1. Misurazione eseguita in un ambiente di laboratorio DJI, nelle condizioni seguenti: Zenmuse L2 montata su Matrice 350 RTK e accesa Pianificazione della rotta di volo eseguita utilizzando la funzione Area Route (Rotta area) di DJI Pilot 2, con calibrazione IMU abilitata. Scansione ripetitiva con RTK in stato FIX. L’altitudine relativa è stata impostata su 150 m, la velocità di volo su 15 m/s, l’inclinazione dello stabilizzatore su -90° e ogni tratto rettilineo della rotta di volo era inferiore a 1500 m. Il campo conteneva oggetti con caratteristiche angolari evidenti e sono stati utilizzati punti di controllo esposti a terra conformi al modello di riflessione diffusa. Per la post-elaborazione è stato utilizzata l’app DJI Terra con l’opzione Optimize Point Cloud Accuracy (Ottimizza precisione nuvola di punti) abilitata. Nelle stesse condizioni, con l’opzione Optimize Point Cloud Accuracy (Ottimizza precisione nuvola di punti) non abilitata, la precisione verticale è di 4 cm e mentre quella orizzontale è di 8 cm.
2. Misurazione effettuata con Zenmuse L2 montata su Matrice 350 RTK, con una velocità di volo di 15 m/s, altitudine di volo di 150 m, sovrapposizione laterale del 20%, calibrazione IMU abilitata, ottimizzazione dell’elevazione disattivata e funzione Terrain Follow disattivata.
3. I dati riportati sono i valori tipici. Misurazione eseguita utilizzando un oggetto piatto con una dimensione superiore al diametro del fascio laser, a un angolo di incidenza perpendicolare e in condizioni di visibilità atmosferica di 23 km. I fasci laser possono raggiungere la distanza di rilevamento ottimale negli ambienti scarsamente illuminati. Se un fascio laser colpisce più oggetti, la potenza totale del trasmettitore laser viene suddivisa e la massima distanza raggiungibile risulta inferiore. La distanza di rilevamento massima è di 500 m.
4. Dopo l’accensione non è necessario riscaldare il modulo IMU, ma gli utenti devono attendere che l’RTK del drone sia nello stato FIX prima di decollare e iniziare a lavorare.
5. Calcolo basato sul confronto con Zenmuse L1.
6. Misurazione eseguita in un ambiente di laboratorio DJI, nelle condizioni seguenti: Zenmuse L2 montata su Matrice 350 RTK e accesa Pianificazione della rotta di volo eseguita utilizzando la funzione Area Route (Rotta area) di DJI Pilot 2, con calibrazione IMU abilitata. RTK in stato FIX. L’altitudine relativa è stata impostata su 150 m, la velocità di volo su 15 m/s, l’inclinazione dello stabilizzatore su -90° e ogni tratto rettilineo della rotta di volo era inferiore a 1500 m.
7. I modelli 3D vengono elaborati mediante rappresentazione sparse.
8. La generazione dei report sulla qualità delle attività è supportata solo per le rotte di tipo intermedio, area e lineari.
